Years ago, GCP Silicon Valley experts invited Dr. Wang Fan, senior manager of Samsung North American R&D Center, to interpret the three factors of intelligent sensing technology in autopilot and the V2X technology of the Internet of Vehicles from his professional perspective.
Dr. Wang Fan, a master's and doctoral degree from the University of Arizona, is a senior manager of the Samsung North American R&D Center. He is responsible for artificial intelligence perception, path planning and decision-making direction in autonomous driving, and is responsible for consulting advice on strategic department investment acquisition.
The following is a shared view of guests:
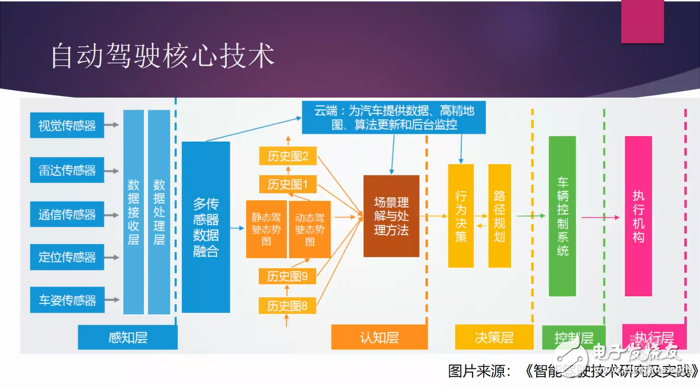
The core technology of driverless has five main modules: sensor, positioning, AI sensing, path planning and decision making, and vehicle control. Sensors include different types of vision, radar, communication, positioning, etc., passing information to the IntelliSense module to detect the environment in which the vehicle is located. Based on the above perceived results, the car determines the optimal path and decision, and finally arrives at the vehicle control and execution to complete the entire process. In addition, positioning means that the vehicle confirms its position on the map by means of GPS or SLAM.
Today, I mainly talk about artificial intelligence perception, but before that, I can probably mention the direction of development in the industry. For example, from the perspective of sensors, Velodyne's laser radar market share and profit margin are very high, and the cost is Tens of thousands of dollars, close to the price of the whole car, so many entrepreneurs in Silicon Valley plan to reduce the cost of laser radar to less than $1,000 to achieve similar performance. In terms of positioning, we know that the best is a real-time positioning system such as RTK (Carrier Phase Differential Technology), but this price is relatively expensive. For example, the SBG positioning sensor commonly used in the market is about 30,000 US dollars, which is relative to the whole vehicle. Very high. Silicon Valley also has a company that achieves similar functions at a price of one-tenth. So there are many companies doing different research on sensors.
Artificial intelligence sensing technology in automatic drivingThe purpose of applying artificial intelligence perception in automobiles is to enable computers to acquire and recognize all environmental information such as distance, speed, orientation, and traffic signs of surrounding vehicles/pedestrians, and then make reasonable planning and decision-making. The reason why autonomous driving has made a big breakthrough in the past two years, the sensing technology has played a vital role, and the image recognition ability of deep learning even reaches the level of the human eye. These more precise algorithms are a prerequisite for the commercialization of autonomous driving.
There are three main factors that contribute to the development of artificial intelligence-aware technologies: structured data with annotations, deep learning algorithms, and computational power/computing platforms.
In terms of training data, there are already public datasets such as ImageNet, KitTI, and Cityscapes. Many startups are using public datasets to develop some initial models. However, these data sets are not very suitable for the needs of autonomous driving, lacking the environmental factors in the process of car travel. So many big companies are collecting video images of car driving and building their own private training data. Private data annotation mainly includes two methods of internal company labeling and outsourcing labeling, which are selected according to the company's own human resources. At present, the larger outsourced data labeling company has a data hall, and CrowdFlower in the form of crowdsourcing. With the increasing use of deep learning, the prospect of data labeling companies is still relatively broad.
Followed by the deep learning algorithm. Many of the industry's autopilots start with computer vision, and computer vision includes various models centered on CNN (convolution neural network), such as YoLov2, SDD, Faster R-CNN, and Mask R-CNN. . These algorithms have their own advantages, but they can only perform better on the PC side. The efficiency of these algorithms may be greatly discounted in the process of car travel and high-speed operation. This requires optimization of the model. The representative companies in China are Shangtang Technology and Geling, and there are many similar companies in Silicon Valley.
The third is the computing platform. There are currently three major trends. Most of the NVIDIA GPUs in use, such as DRIVE PX, Xavier and other very powerful platforms, but they also consume a lot of power. Google released the TPU computing platform for the artificial intelligence framework TensorFlow, but currently the platform is mainly internal. In addition, other chips dedicated to deep learning enable stronger perceptual computing functions with smaller modules in the vehicle environment. The two largest domestic companies in this area are the Horizon and the Cambrian.
Car Network V2XThe above is the more traditional bicycle artificial intelligence method, that is, the sensor-the artificial intelligence's perceptual recognition-path planning and decision-making-control line. Also often mentioned is the Vehicles to Everything (information exchange between the car and all objects). The reason why the Internet of Vehicles will be hot is mainly because the artificial intelligence of bicycles is easily restricted and requires a high success rate to drive on the road. Tesla's autopilot system has caused two accidents due to identification errors. V2X is the development direction to improve the perceived success rate. For example, a car under the bicycle intelligence cannot see the pedestrian in front of the vehicle in front of it. With V2X technology, the front car can transmit the perceived information to the rear car. There is also a traffic light detection. At night, the automatic driving may mistake the brake light of the preceding vehicle as a red light to cause a driving accident. Once the vehicle communicates with the road facility signal in real time, this trouble is avoided.
In summary, the car network mainly includes the following requirements: the car and the back-end server interconnection, including updating the high-definition map, the vehicle system upgrade, etc.; the car and the road facilities are directly interconnected, such as traffic lights, accident warning; vehicle-to-vehicle interconnection. At present, China's official has made the following classification of the development level of the Internet of Vehicles in the relevant documents of the intelligent networked car, and there is no clear definition of this in Europe and the United States. It can be seen that China is ahead in the field of car networking.
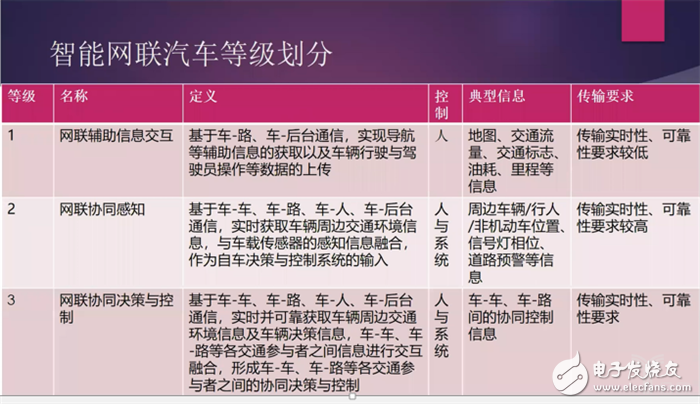
At present, the "network-assisted information interaction" technology with low transmission real-time and low reliability requirements has been realized, and the network-based cooperative sensing technology is still in the research process. The highest level is the network-based collaborative decision-making and control technology. The guests thought that when there are more self-driving cars on the road, the car and the car will drive more reasonably under the greater traffic coordination, but this is extremely demanding for communication technology and the landing time will be far.
There are two international car networking technologies: DSRC and Cellular V2X (LTE-V or 5G). The former is a dedicated short-range wireless communication technology, which can realize the recognition and two-way communication of moving targets under high-speed motion in a specific small area, and can transmit image, voice and data information in real time. The technology is relatively mature and has begun to be applied, with low Delay and reliability features. Many companies have adopted DSRC as their own product and started to use it. The self-driving truck fleet is a good example (one driver driving the car and the rear car driving automatically).
The second category is based on the 4.5G wireless communication industry standard. It is based on the LTE cellular network and is geared towards the future 5G. It is a proprietary protocol for the Internet of Vehicles. Just like a mobile phone, it has a wider communication distance and a larger system capacity (a base station can support the communication needs of hundreds of vehicles), has a cost advantage, and has the characteristics of reliability and low delay. The technology started late, but the starting point is very high, and the market is not very crowded at present.
Q&A sessionQ: What is the biggest difficulty in perception?
A: There are a lot of difficulties. The guests think that the biggest difficulty is to perceive the ability to perceive in special situations (rare scenes). Our current training data can basically cover common road conditions, but whether the car can detect results when it encounters rare road conditions. When it came out, Tesla’s accident was related to this. At present, the perceived success rate is already high, but the last 1% of the problem remains to be resolved.
Q: Is there any way to solve it well for the foreseeable years?
A: In some situations, it is difficult to meet in the real scene, but in the simulation environment, we can build and improve the algorithm.
Q: The importance of car networking in driverless driving?
A: Now we are still in the start-up phase of driverlessness. What everyone is doing is how to launch such a car, but in the future when there are more unmanned vehicles, it is necessary to consider how to make the whole car traffic safer. Solving this problem is a very important position.
Q: What are the difficulties and opportunities for the Internet of Vehicles?
A: The current development of DSRC technology is relatively mature. Cellular V2X started late, and the 5G standard has not yet been determined, but there is much to be done.
Q: Which area of ​​the unmanned car is Samsung deployed?
A: At this year's CES show, Samsung unveiled the first unmanned software and hardware integration platform DRVLINE for the depot. Compared to similar products, DRVLINE is open and modular, and other companies can embed their own algorithms into the platform. Samsung has invested heavily in unmanned driving. It has spent $8 billion to acquire Harman Electronics and enter the TIer1 market. There are also many strategic cooperation and investment cooperation.
6.35MM Power+ Signal Power Connector
power connector is used in power module system. It can select the matching power + signal connector according to the need. The feature is that the number of power and signal contacts and the matching sequence can be selected arbitrarily while keeping the connector size and contact core number unchanged.
Plug (male) / socket (female) can be installed at 90 or 180 degrees. It supports mixed or independent combination of signal and power. The quantity range of power and signal is (2-16) pin and (12-128) pin respectively
Product features
High temperature resistant, glass fiber reinforced and flame retardant polyester is used as insulation material
Copper gold composite conductor with high conductivity is used, and the contact area of the conductor is plated with gold
It adopts shrapnel contact, which has the characteristics of integration, small volume, large current carrying capacity, soft plug-in, blind plug-in, self guidance and high dynamic contact reliability. This series of products can be interchanged with FCI's powerblade series and Tyco's multi-beam series
There are three sizes of center distance of power contact: 5.08mm, 6.35mm and 7.62mm
The length of power hole / signal pin can be selected in two sizes. The power rated current is 45A and the signal rated current is 2.5A
6.35MM Power+ Signal Power Connector
ShenZhen Antenk Electronics Co,Ltd , https://www.antenkwire.com