Servo drives, also known as "servo controllers" and "servo amplifiers", are controllers used to control servo motors. They act like a frequency converter acting on a common AC motor and are part of the servo system. Mainly used in high precision positioning systems. Generally, the servo motor is controlled by three modes: position, speed and torque to realize high-precision transmission system positioning. At present, it is a high-end product of transmission technology.
Servo drives are an important part of modern motion control and are widely used in automation equipment such as industrial robots and CNC machining centers. Especially for servo drives for controlling AC permanent magnet synchronous motors, it has become a research hotspot at home and abroad. The current, servo, and position 3 closed-loop control algorithms based on vector control are commonly used in current AC servo drive design. The speed closed-loop design in this algorithm is reasonable or not, which plays a key role in the performance of the entire servo control system, especially the speed control performance.
In the servo drive speed closed loop, the real-time speed measurement accuracy of the motor rotor is essential to improve the dynamic and static characteristics of the speed loop. In order to balance the measurement accuracy with the system cost, an incremental photoelectric encoder is generally used as the speed measuring sensor, and the corresponding common speed measuring method is the M/T speed measuring method. Although the M/T velocity measurement method has certain measurement accuracy and wide measurement range, this method has its inherent defects, including:
1) At least one complete code wheel pulse must be detected during the speed measurement period, limiting the minimum measurable speed;
2) The two control system timer switches used for speed measurement are difficult to maintain strict synchronization, and the speed measurement accuracy cannot be guaranteed in measurement occasions where the speed changes greatly. Therefore, the conventional speed loop design using the speed measurement method is difficult to improve the servo drive speed following and control performance.

The servo driver adopts digital signal processor (DSP) as the control core, which can realize more complicated control algorithms, realize digitalization, networking and intelligence; power devices generally adopt drive circuit designed with intelligent power module (IPM) as the core. The IPM integrates the drive circuit and has fault detection and protection circuits such as overvoltage, overcurrent, overheat and undervoltage. A soft start circuit is also added to the main circuit to reduce the impact of the startup process on the driver.
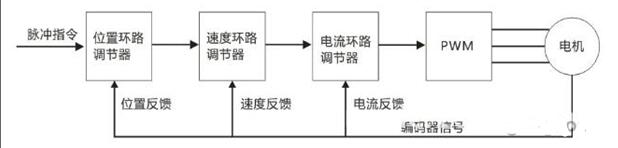
Servo drive working principle diagram
First, the power driving unit rectifies the input three-phase electric or commercial power through a three-phase full-bridge rectifying circuit to obtain a corresponding direct current. After rectification of three-phase electricity or mains, the three-phase sinusoidal PWM voltage inverter is used to drive the AC servo motor. The whole process of the power drive unit can be simply the process of AC-DC-AC. The main topology circuit of the rectifier unit (AC-DC) is a three-phase full-bridge uncontrolled rectifier circuit. Servo drives generally have three control modes: position control mode, torque control mode, and speed control mode. The position control position control mode generally determines the rotation speed by the frequency of the externally input pulse, and determines the angle of rotation by the number of pulses. Some servos can directly assign speed and displacement by communication, due to the position mode. It has very strict control over speed and position, so it is generally applied to positioning devices.
The torque control torque control mode is to set the external output torque of the motor shaft through the external analog input or the direct address assignment. The set torque can be changed by changing the analog setting in real time. It can also be realized by changing the value of the corresponding address by means of communication. The application is mainly in the winding and unwinding devices that have strict requirements on the material, such as the winding device or the fiber-optic device. The torque setting is changed according to the change of the radius of the winding to ensure the stress of the material. It will change as the winding radius changes.
The speed mode can control the rotation speed through the analog input or the frequency of the pulse. The speed mode can also be positioned when the outer ring PID of the upper control device is controlled, but the position signal of the motor or the position signal of the direct load must be used. Give feedback to the upper level for calculation. The position mode also supports the direct load outer loop detection position signal. At this time, the encoder at the motor shaft end only detects the motor speed, and the position signal is provided by the direct final load end detection device. This has the advantage of reducing the intermediate transmission process. The error increases the positioning accuracy of the entire system.
Servo drive applicationServo drives are widely used in the fields of injection molding machines, textile machinery, packaging machinery, and CNC machine tools.

1. Selecting a suitable servo drive needs to consider various aspects. This is mainly based on the requirements of the system. Before selecting the model, first analyze the following system requirements, such as size, power supply, power, control mode, etc. Down direction.

2, the type of motor supported by the driver, generally DC brush, sine wave, trapezoidal wave, etc., and the continuous output current of the driver is greater than the rated current of the motor, according to the motor back electromotive force, the maximum speed to consider whether the driver can be competent.

3, feedback components, feedback sensors are also a wide variety, depending on whether you want to do closed loop, select feedback sensor, encoder, speed motor, revolving and so on. If there is a feedback component in the system, then when selecting the driver, consider whether the driver supports this kind of feedback, feedback type, or feedback signal output form.

4. The servo drive has three control modes: torque, speed and position mode. The command forms are different in these modes. The torque and speed modes can be controlled by analog commands, and the position mode can be controlled by pulse + direction. Of course there are bus forms, such as Ethercat.

5, accuracy requirements, system accuracy has a number of influencing factors, servo drive is also an important part of the general servo drive is divided into digital servo drive and linear servo amplifier, linear amplifier for low noise, high bandwidth and current zero crossing No distortion.

6, power supply and use environment, power supply is mainly DC and AC power supply, sometimes also consider the drive power supply requirements. The use environment is mainly based on the influence of temperature, as well as the working conditions, whether a protective cover is needed.

Plastic Package Diode.Among the electronic components, a device having two electrodes allows only the current to flow in a single direction, and many uses apply its rectification function. The Varicap Diode is used as an electronic adjustable capacitor. Most of the diodes have a current directionality that we often call the "Rectifying" function. The most common function of a diode is to allow only current to pass in a single direction (referred to as forward bias) and block in the reverse direction (referred to as reverse bias). Therefore, the diode can be thought of as an electronic version of the check valve.
Plastic Package Diode,High Frequency Diode,High Voltage Avalanche Diode,Plastic Package Zener Diode
YANGZHOU POSITIONING TECH CO., LTD. , https://www.cnfudatech.com