
UAV control is the control of the various states of the drone (article "Study in the castle: state perspective deep into the UAV hardware and algorithm"). “How to Process GPS Data to Obtain UAV Status Information?†is a complete demonstration of the conversion process from GPS data to UAV outer ring status information. It's time to feel with MR. Castle how the follow-up function is implemented in the actual drone system design.
MR. Castle first needs to choose a drone for the actual system demonstration. The hardware architecture and algorithm system of this product need to be simple and practical, with excellent follow-up performance, and the operating system is direct and transparent.
I finally chose the Skye Orbit drone that I was very optimistic about at CES Asia. I would also like to thank Skye Smart. Although the Kickstarter is in the tight phase of shipment, it is still very enthusiastic to provide prototypes and venues. Skye engineers have successfully completed the entire experiment. MR. Castle is not advertised, and interested students can log in to Kickstarter to find out.
How to design a drone system to implement the following function?

First you need to choose the controlled state. Huh? The controlled state of the drone is not the state of the inner and outer rings. Why do you have to choose? This reflects the flexibility of the drone system design. The follow function is a relative position navigation, you can choose to control the absolute position of the drone; you can also choose to control the relative position between the drone and the tracking target, which means that the distance between the two can be controlled as an extended state; Data fusion is performed by absolute position information and relative position information, and the fusion method is also diverse.
Don't underestimate the difference in this choice: all roads lead to Rome, and the roads are different. Different state choices reflect different understandings of following movements, hardware designs corresponding to them, and algorithm architectures can vary.
It's the most intuitive to look directly at the drone product , and take a look at MR. Castle to see how Skye Orbit implements the following functions in hardware design and algorithm architecture:

The Skye Orbit UAV system includes an armband tracker with built-in GPS. It can be seen that Orbit should be the six outer loop states of the tracking target in real time: position [x, y, z]; speed [u, v, w].
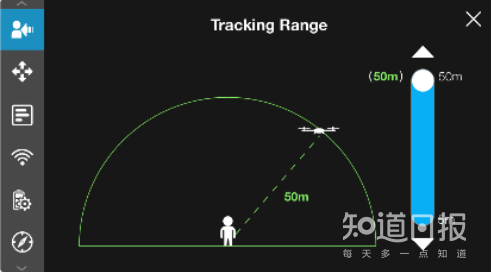
The following distance can be set in the APP, so in different settings, the desired relative distance between the drone and the target is a fixed value. Orbit can calculate the desired position state of the drone by following the state information of the target and the relative distance expected, and compare it with the current state, and obtain the correction amount according to the algorithm. Such an algorithm architecture avoids the extra data conversion process required to treat relative distances as system states.
Hasn't the follow-up function been implemented in this way? However, the drone is not an electronic balloon that is "stranded" by the signal. Position following is only part of the follow-up function, and it is also necessary to collect satisfactory image and image data for the user under the premise of position following. From this point on, it can be counted as a complete robotic system, not just a high-end toy with certain functions.
RAM/RFM Intermediate Frequency Capacitors
RAM/RFM intermediate frequency capacitors
Intermediate Frequency Capacitors,Induction Heating Capacitors,Furnace Resonant Capacitor
YANGZHOU POSITIONING TECH CO., LTD , https://www.yzpstcc.com